

Вештачка интелигенција со моќна компјутерска сила
» Автономните возила не се ништо друго освен сложени компјутери на тркала. Количината влезни податоци кои треба да се обработат во реално време за тие да се снаоѓаат низ градските улици е огромна и затоа им е потребна моќна компјутерска сила, поддржана со вештачка интелигенција. Таа е важна алка за поврзување на неколкуте поединечни електронски управувачки единици кај возилата без возач. Софтверот треба да ги обработува алгоритмите кои со машинско учење ќе се справат со предизвиците за управување со возилото. За тоа е потребен компјутерски капацитет од стотина милијарди операции во секунда. Тоа отприлика е слично на работниот ефект на пет или шест синхронизирани и исклучително силни десктоп работни станици.
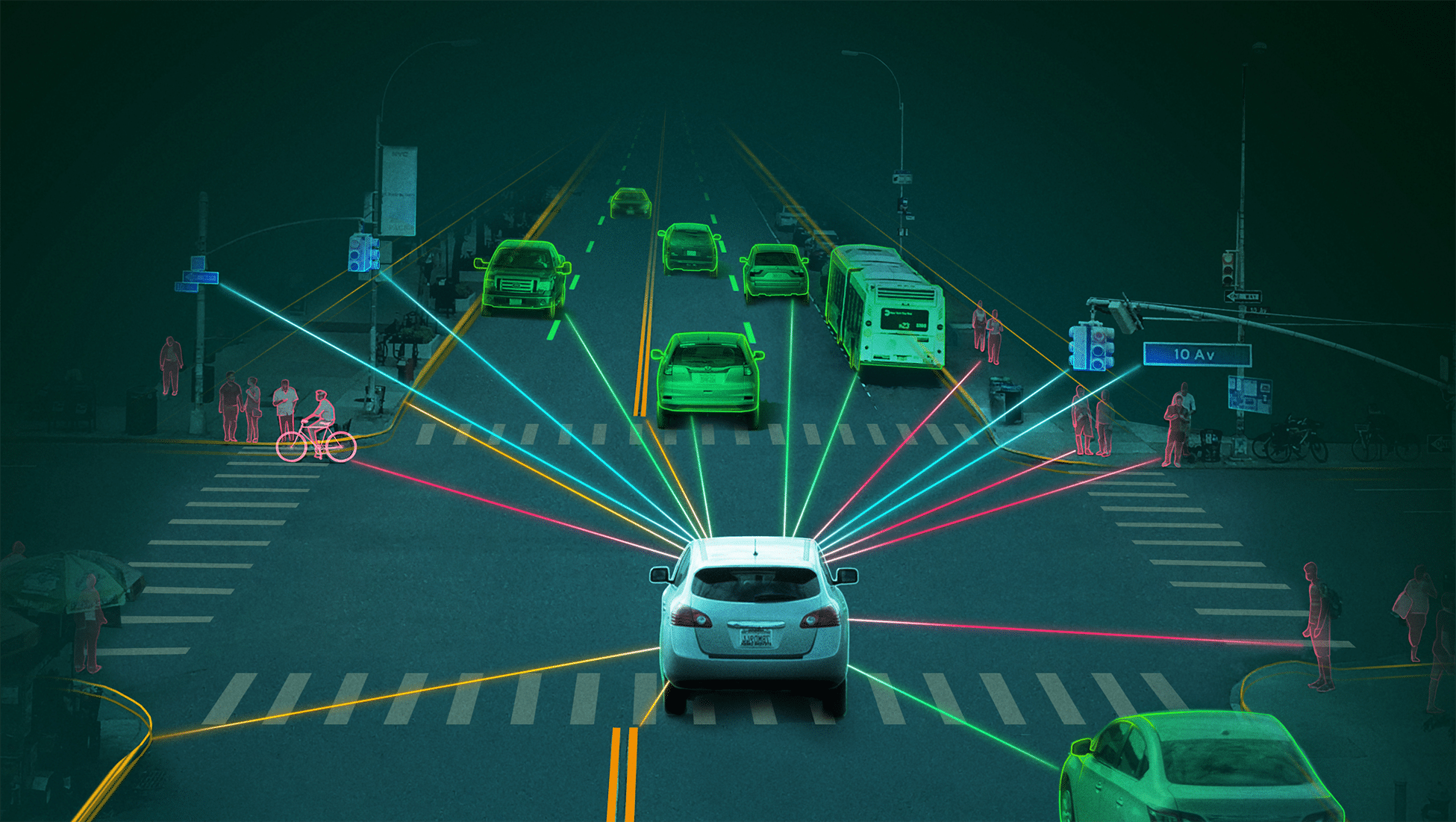
За автономното возење во градовите да стане стварност потребна е разновидна и функционално сигурна архитектура на системите чии перформанси нималу не се ниски – тие треба да управуваат со сите информации што ќе ги соберат и пренесат различните сензори, радари, лидари, камери…. Стерео-видеокамерата, на пример, произведува стотина гигабајти секој километар. Мрежата електронски управувачки единици ги комбинира податоците за околината од сите извори во постапка позната како фузија на сензорите. Тие информации се проценуваат во дел од секундата и врз основа на нив се пресметува траекторијата на движење на возилото. За постигнување максимална безбедност, овие операции паралелно ги изведуваат повеќе системи. Но, големиот компјутерски капацитет и огромниот број операции кои ќе се изведуваат значи дека мрежата електронски управувачки единици мора да се лади. Ефикасен концепт за тоа е таа да биде интегрирана во разладниот систем на батериите, доколку се работи за електрични возила.